Figure 1: Wingman force feedback mouse
This article present a survey about a point-and-click task. This task was done with a force feedback mouse. Compared with a point-and-click task without force feedback, we have not observed a significant reduction of the performance when the target got a force feedback. However, when some other force fields are between the target and the movement origin, (haptic desktop for instance), performances decrease about 23,6%. We propose a dynamic force feedback, where the force intensity decreases when the mouse speed raises up. Performances are again worse than without force feedback, but only about 15,6%.
Categories and Subject Descriptors: H.5.2 [Information Interfaces and Presentation (e.g., HCI)]: User Interfaces — Haptic I/O, Benchmarking
Keywords : Haptic I/O, Benchmarking
With the graphical user interfaces (GUI) and the mouse, the point-and-click task is a very frequent gesture when a computer is used. The developpement of force feedback devices for the desktop computers aroused the interest of the researchers in Human Computer Interaction. Indeed, the performances of the force feedback devices in the fields for which they were conceived (telerobotics and physical simulation) promised clear improvements.
After having set the specific terminology for the force feedback interaction, we will review, the various forms which the force feedback could take, from telerobotics to haptic computer desktops. In a synthesis of the previous works treating of the performances of a point-and-click task, we will see that the case where several potential targets disturbs the gesture, was very few studied. Our test protocol, aiming at studying this case, is then detailed, and its results are discussed. We finish by presenting the future directions that this study opens for our researches.
The tactilo-kinesthesic or "haptic" [11] system consists of :
We can add to these definitions the proprioceptive perception (often included in kinesthetic perception). Proprioceptive perception makes it possible to know the configuration of our body in space.
Hapic feedback is used with an aim of improving the human motor performances in the virtual and telerobotics environments [12,13]. The quantitative tools with which we can evaluate the performances in a point-and-clic task are based on research of Fitts [6].
The movement time (MT) necessary to select a target of size W located at a distance A is :
|
(1) |
where a, b are empirically determined constants. The logarithm log2(A/W) represents the index of difficulty (ID) of the task and is expressed out of bits. Higher is the value of ID and more difficult is the task. If MT is expressed in second, the constant a will be expressed in second and b in seconde/bit. 1/b is the index of performance (IP) and is expressed in bit/seconde.
Let us note that the equation (1) is called the Shannon's formulation of the Fitts'law and was proposed by MacKenzie in 1992 (see [9] for a discussion on the various formulations of the Fitts'law).
Several studies evaluated the use of haptic devices in a point-and-click task.
In 1994, Akamatsu and MacKenzie [1] studied a tactile and force feedback mouse. They showed significant reductions of the movement time MT, when the tactile method is employed. The effect is particularly marked for the small targets. However, they also noted an increase in the error rate. Moreover, the use of the kinesthetic method only does not make significantly lower times of target acquisition. Lastly, the index of performance IP is not significantly different from that observed without force feedback.
Eberhardt [5] and Hasser [7] studied, respectively in 1997 and 1998, the effects of areas of attraction around the targets. These areas bring the pointer of the mouse to the center of the target. In these cases, the performances observed are really better (about 25%) than without force feedback.
For Wall [14], the study was focused on the index of performance IP during a point-and-click, carried out with PHANToM. He found that the force feedback, although improving acquisition times, does not have effects on the index of performance IP. On the other hand, for the "ballistic" movements (ID < 3bits), they showed a significant improvement of the index of performance of the task.
Lastly, Dennerlein also studied the contribution of the force feedback. A first study [3] realized in 2000, was about the follow-up of curves. The force feedback took the form of an attraction of the cursor on the curve due to a kind of haptic tunnel. He proved that the movements carried out with a feedback of force were 52% faster than without. A second study [4], realized in 2001, was about the movements of tagets acquisition. It was the concept of attractions area around the target which was retained. The results are similar with those of Eberhardt and Hasser : an improvement of 25% of the performances is observed with the use of the force feedback. It also showed that this difference was reduced when other haptic basins of attraction were generated.
In conclusion, it appears that the force feedback tend to improve the performances. Acquisition time of a target improve of 25% when the force fields acts beyond the target; on the other hand, when the force is activated only with the overflight of the target, times are not significantly different. Moreover, in the case of disturbances resulting from others target potential which generate their own force feedback, as in the case of an office haptiquement increased (for example the immersion haptic desktop [8]), the performances drop.
We now will study how these disturbances influence the performances, in the case of a force feedback restricted to the target, and with a workspace entirely filled of zones generating a haptic feedback.
Nine subjects (8 men and 1 woman, from 21 years old to 40 years old) participated in the experiment. All the subjects were familiar with the use of a mouse; two of them had already used a force feedback mouse.
We use the "Wingman Force Feedback Mouse" (Figure 1) conceived by Immersion Corporation [8] and marketed by Logitech.
The mouse itself is interdependent of its base. In fact, the working surface is very reduced : 1,9 cm by 2,5 cm. Lastly, the mouse can generate forces that can reach 1 N.
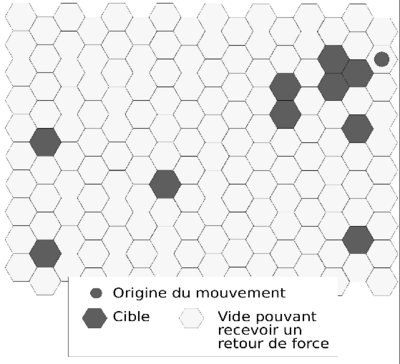
During the experiment, each subject must go to click on a small circle in the right top corner of the screen : the origin. Once the click carried out on the origin, an hexagonal target appears on the screen. The subject have to go to click as quickly as possible on this target. The subject can prepare its gesture as long as the cursor of the mouse does not leave the origin. When he clicked on the target, this one desappears and he must turn over to the origin in order to generate a new target.
The whole of the experiment is divided into 4 phases, corresponding to 4 conditions of haptic feedback :
|
Before each timed phase, a training phase allows the subject to be accustomed to handle the device under the various conditions.
There are 10 different targets. Each one is presented 4 times at the subject by phase. Thus, each subject will have 160 movements origin-target to realize for a set of 1440 movements for the whole of the subjects.
The parameters of the experiment are summarized in the table 1 and the protocol interface is shown on the figure 2.
| DISTANCES WITH THE TARGET | 21, 72, 92, 138, 205, 233, 415, 586, 831, 938 pixels |
| SIZE OF THE TARGET | 40 pixels |
| CONDITIONS |
|
The analysis of variance (ANOVA) performed on the movement time enable us to pronounce on the significativity of the experimental factors : the 4 experimental conditions and the 10 index of difficulty from our 10 different targets. It appears that the factor "experimental conditions" is very significant (F3,39=10.3, p < 0.0001), as well as the factor "index of difficulty" (F9,39=24.96, p < 0.0001). Moreover, the two factors do not influence each other (F27,39=0.35,p=1,0000).
The mean times for the 4 conditions of haptic feedback are shown in table 2.
| MT | MTF | MTDF | MTDFH |
| 585 ms | 584 ms | 723 ms | 676 ms |
| - | (-0,2%) | (+23,6%) | (+15,6%) |
We can already observe that there is no significant difference between clicking on a target without force feedback (MT) and with force feedback (MTF). This joined the observations of Akamatsu [1] and is explained by the fact why the force feedback is activated only when the pointer overfly the target. On the other hand, the fact that there are fields of force between the origin and target (MTDF and MTDFH) generates a significant rise of times (respectively +23,6% and +15,6% compared to the movement without force feedback). In these cases, the pointing task is perturbed by the other forces. Lastly, the adaptation of the force feedback on the velocity of the cursor reduces this loss of performance about 6,5%.
We could hope a better result for the MTDFH condition. However, the optimized initial impulse model [10] give us an explanation : the more likely cases of a point-and-clic task consist of a first initial movement that under or over shoots the target, followed by subsequent corrective movements. With our adaptative force, the initial movement may be kept in a wrong target.
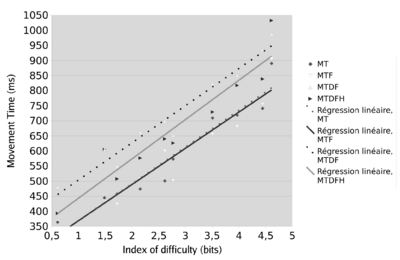
The linear regressions on the averages of the data give us the linear coefficients of regression of the equation (1) for the various conditions of haptic feedback. Thus, the table 3 presents the various models of the Fitts'law according to these conditions.
| Conditions | Fitts'law model | R2 |
| MT | MT = 0.25 + 0.122 ID | 0,93 |
| MTF | MT = 0.25 + 0.120 ID | 0,91 |
| MTDF | MT = 0.38 + 0.123 ID | 0,96 |
| MTDFH | MT = 0.31 + 0.130 ID | 0,90 |
The various conditions differ significantly only from their intercepts. The slopes of each model are very close. Lastly, we can note, due to the high values of the R2 that the Fitts'law explains more than 90% of the variance in observations.
We can now trace the synthesis of measurements of our experiment (figure 3).
For 50 years, the force feedback devices have been used in many fields : telerobotics, physical simulation, virtual reality, medical applications or accessibility. The study of the human performances at the time of the handling of these devices goes up with ten years, in fact when they were proposed in versions large-public.
It appeared that the force feedback could improve the performances, but in cases not very applicable to complex situations : only one haptic enhanced target. In the case of a multiplication of the potential targets, the haptic feedback even becomes a factor of loss of performances.
We proposed here an adaptive force feedback, calculated according to the current velocity of the pointer. The performances only degrade by 15.6%.
We envisage to test other dynamic adaptations of the forces, based on velocity or even acceleration. Moreover, we intend to modify the test protocol in order to test the significativity of the sites of the targets : which difference in performances can we observe in a point-and-clic task where the target and the origin are separated by aligned and non-aligned force fields? Due to the answer to this question, we would be able to get indications for the designs of widgets with haptic Enhancement.
We would like to thank Alain Baccini, Professor at the Laboratory of Statistics and Probabilities of the University Paul Sabatier (Toulouse 3) for assistance during the statistical analysis of the data.