Figure 1: La souris Wingman force feedback mouse
Cet article présente une étude réalisée lors d'une tâche de pointage à l'aide d'une souris à retour de force. Par rapport à une tâche de pointage sans retour de force, et conformément aux études déjà réalisées sur le sujet et dans les mêmes conditions, nous n'avons pas observé une amélioration significative des performances lorsque la cible seule est liée à un retour de force. De plus, lorsque d'autres champs de force sont situés entre la cible et la position initiale du geste (cas applicable à un bureau haptiquement augmenté), les performances avec retour de force s'amoindrissent de 23,6%. Nous proposons un retour de force dynamique, où l'intensité de la force se réduit quand la vitesse de la souris augmente. Les performances sont alors toujours moins bonnes que sans retour de force, mais plus que de 15,6%.
Mots Clés : loi de Fitts, retour de force, geste de pointage
This article present a survey about a point-and-click task. This task was done with a force feedback mouse. Compared with a point-and-click task without force feedback, we have not observed a significant reduction of the performance when the target got a force feedback. However, when some other force fields are between the target and the movement origin, (haptic desktop for instance), performances decrease about 23,6%. We propose a dynamic force feedback, where the force intensity decreases when the mouse speed raises up. Performances are again worse than without force feedback, but only about 15,6%.
Categories and Subject Descriptors: H.5.2 [Information Interfaces and Presentation (e.g., HCI)]: User Interfaces — Haptic I/O, Benchmarking
Keywords : Haptic I/O, Benchmarking
Avec les interfaces graphiques et la souris, l'acquisition d'une cible pour la cliquer, est un geste très fréquent quand on utilise un ordinateur. L'apparition de souris à retour de force dans les années 90 a suscité l'intérêt des chercheurs en Interaction Homme Machine, car les performances des périphériques à retour de force dans les domaines pour lesquels ils ont été conçus (télé-robotique et simulation physique) promettaient de nettes améliorations dans les tâches de pointage effectuées devant un bureau virtuel.
Nous verrons, dans une synthèse des articles antérieurs traitant des performances d'un geste d'acquisition d'une cible liée à un retour de force, que le cas où plusieurs cibles potentielles perturbent le geste a été très peu étudié. Notre protocole de test visant à étudier ce cas est alors détaillé, et ses résultats discutés. Nous terminons en présentant les directions futures que cette étude ouvre pour nos recherches.
Le retour haptique est utilisé dans le but d'améliorer les performances motrices humaines dans les environnements virtuels et télé-robotiques [10,11]. Les moyens quantitatifs avec lesquels nous pouvons évaluer les performances motrices humaines lors d'une tâche d'acquisition de cible sont basés sur les recherches de Fitts [5].
Le temps du mouvement (MT) requis pour sélectionner une cible de taille W situé à une distance A est:
| (1) |
où a, b sont des constantes déterminées empiriquement. Le logarithme log2(A/W +1) représente l'indice de difficulté (ID) de la tâche et est exprimé en bits. Plus élevée est la valeur de ID et plus difficile est la tâche. Si MT est exprimé en seconde, la constante a sera exprimée en seconde et b en seconde/bit. L'inverse de b (soit 1/b) est l'indice de performance (IP) et est exprimé en bit/seconde.
Notons que l'équation (1) est appelée la formulation de Shannon de la loi de Fitts et a été proposée par MacKenzie en 1992 (voir [8] pour une discussion sur les différentes formulations de la loi de Fitts).
Plusieurs études ont évalué l'utilisation de périphériques haptiques dans une tâche de pointage.
En 1994, Akamatsu et MacKenzie [1] ont étudié une souris tactile à retour de force. Ils ont montré des réductions significatives du temps de mouvement MT lorsque la modalité tactile est employée. L'effet est particulièrement prononcé pour les petites cibles. Cependant, ils ont également noté une augmentation du taux d'erreur. De plus, l'emploi de la modalité kinesthésique seule ne fait pas baisser significativement les temps d'acquisition d'une cible.
Eberhardt [4] et Hasser [6] ont étudié, respectivement en 1997 et en 1998, les effets de bassins d'attraction autour des cibles. Ces bassins amènent le pointeur de la souris au centre de la cible. Dans ces cas, les performances observées lors d'une tâche de pointage sont réellement meilleures (de l'ordre de 25%) que sans retour de force.
Pour Wall [12], l'étude s'est focalisée sur l'indice de performance IP (soit l'inverse de la pente de régression linéaire) au cours d'une tâche de pointage effectuée avec un PHANToM. En 2000, il a ainsi retrouvé les résultats de Akamatsu et MacKenzie, à savoir que le retour de force, bien qu'améliorant les temps d'acquisition des cibles, n'a pas d'effets sur l'indice de performance IP.
Enfin, Dennerlein a également étudié l'apport du retour de force. Dans une première étude [2] réalisé en 2000, il s'est intéressé au suivi de courbes. Le retour de force prenait la forme d'une attraction du curseur sur la courbe grâce à une sorte de tunnel haptique. Il s'est avéré que les mouvements effectués avec un retour de force étaient 52% plus rapides que sans. Dans une deuxième étude [3], réalisée en 2001, il s'est intéressé aux mouvements d'acquisition de cibles. Pour le retour de force, généré par une souris, c'est le concept de bassins d'attractions autour de la cible qui a été retenu. Les résultats sont similaires à ceux de Eberhardt et d'Hasser: une amélioration de 25% des performances est observée avec l'utilisation du retour de force. Il a également montré que cette différence s'amoindrissait lorsque d'autres bassins d'attraction haptiques étaient générés, en plus de celui généré par la cible.
En conclusion, il apparaît que le retour de force tends à améliorer les performances. Les temps d'acquisition d'une cible s'améliorent de 25% lorsque le champ de force agit au delà de la cible; par contre, lorsque la force n'est déclenchée qu'au survol de la cible, les temps ne sont pas significativement différents. De plus, dans le cas de perturbations issues d'autres cibles potentielles qui génèrent leur propre retour de force, comme dans le cas d'un bureau haptiquement augmenté (par exemple l'immersion haptic desktop [7]), les performances baissent.
Nous allons maintenant étudier comment ces perturbations influent sur les performances, dans le cas d'un retour de force restreint à la cible, et avec un espace de travail entièrement rempli de zones générant un retour haptique.
Neuf sujets volontaires (8 hommes et 1 femme âgés de 21 ans à 40 ans) ont participé au test. Tous les sujets ont l'habitude d'utiliser une souris; deux d'entre eux avaient déjà utilisé une souris à retour de force.
Nous utilisons la souris à retour de force << Wingman Force Feedback Mouse >> (Figure 1) conçue par Immersion Corporation [7] et commercialisée par Logitech.
La souris proprement dite est solidaire de son socle. De fait, la surface de travail de cette souris est très réduite : 1,9cm par 2,5cm. Enfin, la souris peut générer des forces pouvant atteindre 1N.
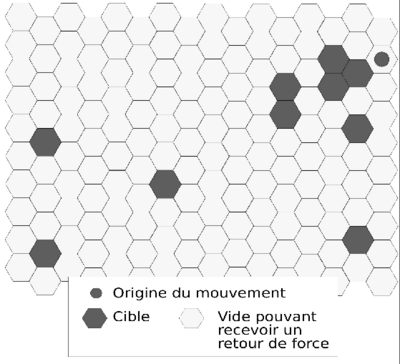
Pendant l'expérience, chaque sujet doit aller cliquer sur un petit rond en haut à droite de l'écran: l'origine. Une fois le clic effectué sur l'origine, une cible hexagonale apparaît à l'écran. Il lui faut aller cliquer le plus vite possible sur cette cible. Le sujet peut préparer son geste aussi longtemps qu'il le souhaite, tant que le curseur de la souris ne quitte pas l'origine. Quand il a cliqué sur la cible, celle-ci disparaît et il doit retourner à l'origine afin de générer une nouvelle cible.
L'ensemble de l'expérience est divisée en 4 phases, correspondants à 4 conditions de retour haptique :
|
Avant chaque phase chronométrée, une phase d'entraînement permet au sujet de s'habituer à manipuler le périphérique dans les différentes conditions.
Il y a 10 cibles différentes. Chacune est présentée 4 fois au sujet par phase. Ainsi, chaque sujet aura 160 mouvements origine-cible à réaliser pour un ensemble de 1440 mouvements pour l'ensemble des sujets.
Les paramètres de l'expérience sont résumés dans la table 1 et l'interface de l'expérimentation est présentée sur la figure 2.
| DISTANCES À LA CIBLE | 21, 72, 92, 138, 205, 233, 415, 586, 831, 938 pixels |
| TAILLE DE LA CIBLE | 40 pixels |
| CONDITIONS EXPERIMENTALES | MT , MTF, MTD et MTDF |
L'analyse de la variance (ANOVA) permet de nous prononcer sur la significativité des facteurs jouant sur nos mesures : les 4 conditions expérimentales et les 10 indices de difficulté de nos 10 différentes cibles. Il apparaît que le facteur << conditions expérimentales >> est très significatif (F3,39=10,3, p < 0.0001) , ainsi que le facteur << indice de difficulté >> (F9,39=24,96, p < 0.0001). De plus, les deux facteurs n'influent pas l'un sur l'autre (F27,39=0,35,p=1,0000).
Les moyennes des temps pour les 4 conditions de retour haptique sont dans le tableau 2.
| MT | MTF | MTDF | MTDFH |
| 585 ms | 584 ms | 723 ms | 676 ms |
| - | (-0,2%) | (+23,6%) | (+15,6%) |
Nous pouvons déjà observer qu'il n'y a pas de différence significative entre cliquer sur une cible sans retour de force (MT) et avec retour de force (MTF). Ceci rejoint les observations de Akamatsu [1] et s'explique par le fait que le retour de force sur la cible n'est activé que lorsque le pointeur s'y trouve, à la différence d'autres expériences qui élargissaient le bassin d'attraction au delà de la taille de la cible[6,4,12,3]. Par contre, le fait qu'il y ait des champs de force entre l'origine et la cible (MTDF et MTDFH) génère une hausse significative des temps (respectivement +23,6% et +15,6% par rapport au mouvement sans retour de force). Le geste de pointage est dans ces conditions très perturbé par la présence les nombreuses forces autres que la force liée à la cible. Enfin, l'adaptation du retour de force sur la vitesse du curseur permet de réduire cette perte de performance de 6,5%.
Nous aurions pu espérer une amélioration plus nette des temps de pointage dans la condition MTDFH. Cependant, le modèle d'impulsion initiale optimisée de Meyer [9] nous apporte une expication possible : Le geste le plus fréquent lors d'une tâche d'acquisition de cible consiste en un premier mouvement initial qui dépasse ou n'atteint pas la cible, suivi de plus petits mouvements correctif pour parvenir réellement sur la cible. Avec notre retour de force adaptatif, le geste de pointage pouvait se retouver << emprisonné >> sur une zone proche de la cible.
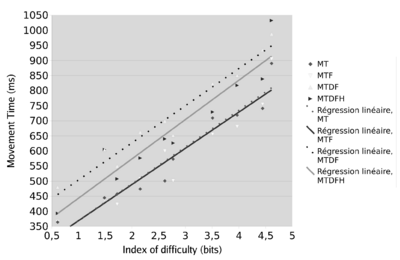
Les régressions linéaires sur les moyennes des données nous donnent les coefficients de régression linéaire de l'équation (1) pour les différentes conditions de retour haptique. Ainsi, la table 3 présente les différents modèles de la loi de fitts selon ces conditions.
| Conditions | Modèle de la loi de Fitts | R2 |
| MT | MT = 0,25 + 0,122 ID | 0,93 |
| MTF | MT = 0,25 + 0,120 ID | 0,91 |
| MTDF | MT = 0,38 + 0,123 ID | 0,96 |
| MTDFH | MT = 0,31 + 0,130 ID | 0,90 |
Les différentes conditions ne diffèrent pas de manière significative. Les pentes de chaque modèle sont très proches. Les ordonnées à l'origine diffèrent un peu plus. Enfin, nous pouvons noter, grâce aux valeurs élevées des R2 que la loi de Fitts explique plus de 90% des variations dans les observations.
Nous pouvons maintenant tracer la synthèse des mesures de notre expérience (figure 3).
Pour finir, la méthode statistique de Bonferroni permet de grouper les observations en groupes significativement différents. Dans notre cas, cette méthode regroupe les observations MT et MTF en un premier groupe non-significativement différent, et les conditions MTDF et MTDFH en un deuxième. Notre proposition d'adapter le retour haptique à la vitesse de la souris (condition MTDFH) n'apparaît donc pas significativement différent de la condition sans adaptation (p > 0,15).
Depuis 50 ans, les périphériques à retour de force sont utilisés dans de nombreux domaines : télé-robotique, simulation physique, réalité virtuelle, applications médicales ou accessibilité. L'étude des performances humaines lors de la manipulation de ces périphériques remonte à une dizaine d'années, soit lorsqu'ils ont été proposés dans des versions grand-public.
Il est apparu que le retour de force pouvait améliorer les performances, mais dans des cas peu applicables à des situations complexes : une seule cible haptiquement augmentée. Dans le cas d'une multiplication des cibles potentielles, le retour haptique devient même un facteur de perte de performances.
Nous avons proposé ici un retour de force adaptatif, calculé en fonction de la vitesse courante du pointeur. Les performances s'améliorent alors de 6,5%.
Nous prévoyons de tester d'autres adaptations dynamiques des forces, basés sur la vitesse ou même l'accélération. Nous allons également tenir compte !!!!!!. De plus, nous comptons modifier le protocole de test afin de tester la significativité des emplacements des cibles : quelle différence de performances peut-on observer lors de la tâche de sélection d'une cible séparée de l'origine par des champs de force alignés et non-alignés ? De la réponse à cette question, nous pourrons tirer des indications pour la conceptions d'interacteurs haptiquements augmentés.
Nous tenons à remercier Alain Baccini, Professeur au Laboratoire de Statistique et Probabilités de l'Université Paul Sabatier (Toulouse III) pour son aide précieuse lors de l'analyse statistique des données.