Use of Force Feedback Pointing Devices for Blind Users
Bertrand Tornil and Nadine Baptiste-Jessel
Abstract
In this paper, we discuss the possible uses, for a blind user, of force
feedback pointing devices, such as the mouse Wingman Force
Feedback Mouse and the PHANTOM,
associated with a sound feedback. We set the definitions of the gesture
interaction and propose the interaction loop relative to these
devices. Related works enable us to raise the limit of their use
and thus to specify within which framework they are adapted: the relative localization
of elements compared to the
others. The applications that we are developing are based on this context
of use. We present our application of geography which indicates the relative
positions of the areas on a map, via a
force feedback mouse and a voice synthesis. Lastly, we present the
prototype of our three-dimensional application which accounts for the
relative position of the human body elements. In order to
automate the treatment as much as possible, we based our applications
on data files in XML: the SVG for the geographical maps and the
X3D will be retained for the format of the forms in 3D.
Keywords: accessibility, force feedback pointing devices, gestural interaction
1 Introduction
In front of a computer, a blind user uses the keyboard to operate
the machine which answers him by a voice synthesis and/or a
braille display. The text processing is well adapted to these methods.
However, a graphic document will be presented to him by long
and tiresome descriptions. The force feedback devices are used
within the framework of the accessiblity for the blind users because
they authorize a more direct interaction based on sensory
capacities.
We first of all will set the main definitions of the
gestural interaction and will locate the perceptual mechanisms
needed in order to use these devices. We concentrate
here more specifically on force feedack pointing devices like the
mouse. While reviewing related works
within the framework of the accessibility for the blind users, as well
as the limits observed, we propose a specific context of use for these
devices: relative localization.
We present then two applications of the relative localization. In 2D,
it is a programme of reading of geographical maps which allows a
better accessibility for the blind men; and in 3D, our prototype makes
it possible to a blind man to deduce the position from a human body model
displayed on the screen. Lastly, we will conclude by presenting the
outlooks which we consider.
2 The gestural interaction
We set the general standards which relate to the gestural interaction
between the user and the machine. A action-reaction loop (or
interaction loop) could then be defined in our applicative context.
2.1 Human gesture
The tactilo-kinesthetic or " haptic" [Rev50] system is the
synthesis of the movements of exploration of the motor system
and of perceptions of the tactile
system. The haptic sense is thus both
effector and receptor. [LK87] classified these two
aspects in the following way:
- movements of exploration of the hand:
- side friction (movement on both sides of
the surface of an object)
- envelopment
- the static contact (positioning of the palm of the hand
on the surface of an object)
- the following of contours
- the pressure (regular force applied to a given place of
the object)
- the rising of an object
- sensory capacities related to the gestural modality:
- the cutaneous sense: it is the touch sense. It allows
to feel the temperature, the pressure
or the pain, and is relayed by sensory receptors located under
the skin.
- the kinesthetic sense: it is the sense related on the
position and the movements of the body. It enables us for example to
know the weight of an object we're handling and its position. It
is relayed by receptors based in the muscles, the tendons and the
articulations.
All these human capacities must
have their equivalent on the machine, in order to accomplish the interaction
loop. We will see further which sensory and explorative
capacities are stimulated according to the devices that we use.
2.2 Computer "gesture"
There are numerous force feedback and/or tactile devices.
In our study, we focused more specifically on the
force feedback pointing devices. These devices handle
only one pointer in the virtual space of the machine: the position of
the device is then translated into a couple of coordinates (x,y) in 2D or a triplet (x, y, z) in 3D.
The devices are the Wingman Force Feedback Mouse for
the 2D and the PHANToM for the 3D.
2.2.1 The Wingman Forces Feedback Mouse
This force feedback mouse (figure 1), was created by Immersion Corporation
and marketed by Logitech.
The mouse is interdependent of its
base. The effective surface of work is of 1.9 X 2.5 cm and the forces
can reach 1N in peak. The Wingman formely was a game
device, but its use was diverted toward research
on the accessibility.
2.2.2 The PHANTOM
The PHANTOM (figure 2) was created
and is marketed by Sensable Technology. It is the most popular
device in research on the haptic interaction. The volume of work
is of 13 X 16 X 13cm and the force feedback can reach 8.5N.
2.3 The interaction loop for the pointing
The handling of these two pointing devices makes use of
the movements of exploration of the arm. Articulations of the
shoulder, the elbow and the wrist, and their associated muscles are
thus implemented. The feedback operates on the same parts of the body.
It is thus kinesthetic perception related to the arm via the shoulder,
the elbow and the wrist which is requested.
3 Force feedback for blind users
3.1 Related Works
The use of the force feeback for blind users aims to make up,
as much as reasonably possible, for the absence of the visual
channel. Several approaches exist.
- Haptic feedback of a graphic interface. Thanks to force feedback mice,
[Ram96] and [Ros97] transcribed the
the graphic interactors of the interface in force feedback.
- Haptic feedback of the contents and the layout of a document. The
translation of mathematical figures or tables was studied by
[FB96]. [FB99] finally carried out a haptic system
of visualization based on the PHANToM for people with
visual handicap. [OT01] developed a programming library
making it possible to identify the layout of a document and to guide
the hand of the user on this document.
- Description of graphic documents. [HFR98] studied the
possibilities of a force fedback on VRML (Virtual Reality Markup
Language), a 3D file format on the Web. [GB01] used
the SVG (Scalable Vector Graphics) to enable blind users to read geographical
maps.
- Apprehension of shapes or textures. [FB96] worked
on the synthesis of haptic textures. [CPK+98] used
the Impulse Engine 3000 to study perception by the blind users of textures
and virtual shapes. Finally [YRB01] studied the
perception of mathematical graphics by blind users using the
PHANToM.
Moreover, [DMR95] showed the interest of the audio-haptic
bimodality for blind users. The table 1 indicates the
percentage of good answers for three modal situations for 12 sighted users
and 12 blind users.
3.2 Limits
Limits were raised in the use of force feedback pointing devices
for the blind users. As follows:
- the use of these devices for the
perception of textures is inadequate, as pointed [YRB01].
Indeed, the cutaneous perceptors of the skin are not stimulated.
- [MRGSD02] and [CPK+98] pointed that the
single contact point of the PHANToM does not allow
the recognition of a three-dimensional complex shape. The gestures of
envelopment of the hand would allow such a recognition, but that would
need a device activating the kinesthesic feedback on the fingers.
3.3 Relative localization
The use of force feedback pointing devices must be
based on the properties of the kinesthesic interaction of the arm.
Kinesthesic perception related to the arm enables us to visualize the
position of the hand in space. Thus, if an haptic event, like a
vibration or a shock, occurs during a move of the
arm, we can mentally represent the position that the hand had when
the event occurred.
Associated with a voice synthesis, this approach will allow the
rebuilding of a mental image of an object from the relative
positions of the elements of this object.
The two applications which we will present use the force feedback in
this context.
4 Applications of the relative localization
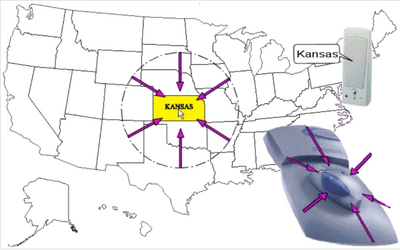
4.1 2D application: Géogr'Haptic
In this application, which run in a Internet browser, we
display a map indicating the American states. A blind user
handle the Wingman Force Feedback Mouse to
explore the surface of the screen. When the pointer of the mouse
passes on an area, it is "magnetized" toward its center. A
sound feedback gives the name of the state, via a screen reader
and a voice synthesis. The figure 3 illustrates this
operation.
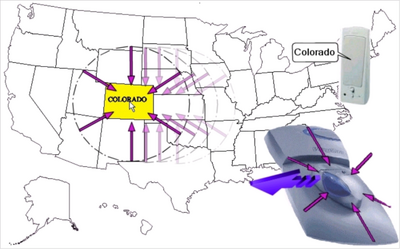
It is then necessary for the user to force his way out of
the area, and either:
- to fall into a state bordering
and to hear the name of this state, as the figure 4 shows it;
- to leave the map, and then to feel an effect of texture.
The format of the map is the SVG [SVG03] which is the
implementation in XML of the vectorial pictures. The interest to use
this format is multiple:
- its contents can
be indexed by the search engines on the Web.
- the SVG supports the DOM (Document Object Model) and
is therefore entirely scriptable. Geogr'Haptic is coded in
Javascript.
- graphics in SVG can react to the users events such as
onMouseOver() when the mouse passes on an area or onMouseClic() when
the user clicks.
- the SVG can be displayed perfectly on all platforms, all output
resolutions, with various bandwidths.
The first tests which we carried out with blind users are
encouraging: they are able to quote the frontier states of Canada, or
which states one must cross to go from a point A to a point B, which
would not be possible by using traditional pictures on the Web.
4.2 3D application
This application uses the same principle as géogr'Haptic
but in three dimensions thanks to the use of the
PHANToM. We plan to base the application on the
3D XML format: the X3D [X3D02]. However, for the
prototype, we currently use the POSER file format
[Cur04] which contains, like the X3D, some meta-datas.
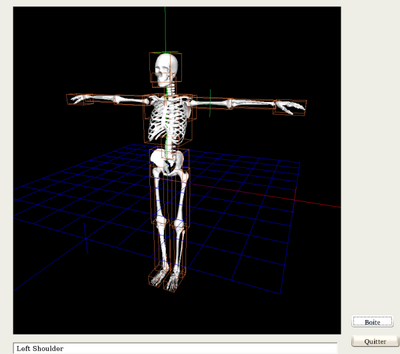
The figure 5 shows the prototype of the application after
the loading of a model of a human skeleton.
When we load the 3D model, the bounding boxes of each element are
computed. A 3D cursor moved by the
PHANToM allows to navigate into the 3D scene. A
force feedback then attracts the pointer in the center of the
nearest bounding box, while a voice synthesis reads the name of this
element.
Nowadays, our prototype allows to blind user to deduce
the 3D model position. For instance, on the figure 5
it is standing with the arms in cross.
5 Outlooks
We should soon propose a test protocol which aims to confront our
prototypes with the existing tools of access to the graphic
documents for blind people.
The prototype of our 3D application is still in an early stage
development. For complex 3D models, our application will have
to filter informations to be handled by the force feedback
in instance to produce a scene with a good haptic
legibility.
We're going to use the XML 3D file format for the Web: the
X3D [X3D02]. Just like the SVG, the X3D is
completely scriptable, and support the DOM, which enables us to
consider an exploitation in a Internet browser. Moreover its
specifications include the management of the objects displayed by
pointing devices.
We must also study adjustments of the force feedback, which would
be specific with the 3D model loaded: an effect could thus guide
the user hand along the elements and the effects could be
characteristic of the various parts of the body (the intensity of the
effect would be different if we are in a bone or in an organ).
This leads us to our last objective: we are about to build a 3D model of a
human body including the organs. The haptic reading of
such a model would be useful for blind and sighted users,
in a pedagogical context.
6 Aknowlegdment
The authors would like to thank Frederic Gianni for providing
the handling libraries of POSER file, and for
its constant support.
References
- [CPK+98]
-
C. Colwell, H. Petrie, D. Kornbrot, A. Hardwick, and Furner S.
Use of a haptic device by blind and sighted people: perception of
virtual textures and objects.
In Improving the quality of life for the European citizen:
technology for inclusive design and equality. Amsterdam: IOS Press, i.
placencia-porrero and e. ballabio edition, 1998.
- [Cur04]
-
Curious Labs.
Poser 5.
http://www.curiouslabs.com/, 2004.
- [DMR95]
-
A. Dufresne, O/ Martial, and C. Ramstein.
Multimodal user interface system for blind and 'visually occupied'
users: Ergonomic evaluation of the haptic and auditive dimensions.
In Proceedings of IFIP International Conference Interaction'95,
Lillehammer, Norway, pages 163-168, 1995.
- [FB96]
-
J.P. Fritz and K.E. Barner.
Design of haptic graphing method.
In Proceedings of RESNA-96 Annual Conference, Salt Lake City,
USA, pages 158-160, 1996.
- [FB99]
-
J.P. Fritz and K.E. Barner.
Design of a haptic visualisation system for people with visual
impairments.
In IEEE Transactions on Rehabilitaion Engineering, pages
372-384, 1999.
- [GB01]
-
J.A. Gardner and V. Bulatov.
Smart figures, svg, and accessible web graphics.
In Proceedings of Technology And Persons With Disabilities
Conference 2001, Los Angeles, 2001.
- [HFR98]
-
A. Hardwick, S. Further, and J. Rush.
Tacile display of virtual reality from the world wide web - a
potential access method for blind people.
Display, 18, Issue 3:151-161, 1998.
- [LK87]
-
S. J. Lederman and R. L. Klatzky.
Haptic exploration in humans and machines: An initial overview.
Technical report, Office of Naval Research, 1987.
- [MRGSD02]
-
C. Magnusson, K. Rassmus-Gröhn, C. Sjöström, and H. Danielsson.
Navigation and recognition in complex haptic environments - reports
from an extensive study with blind users.
Présenté à EuroHaptics, Edinburgh, UK, July 8-10, 2002.
- [OT01]
-
D. Offen and B. Thomlinson.
Good vibrations: Using a tactile mouse to convey page layout
information to visually impaired computer users.
In Proceedings of CSUN'S Sixteenth Annual International
Conference :"Technology and Persons with Disabilities", Los Angeles, 2001.
- [Ram96]
-
C. Ramstein.
Combining Hpatic and Braille Technologies, Design Issues and Pilot
Study.
In ASSET'96, ACM/SIGCAPH. In 2nd Annual ACM Conference on
Assistive Technologies, Vancouver, BC, Canada, pages 37-44, 1996.
- [Rev50]
-
G. Revesz.
Psychology an art of the blind.
New York: Longmans, 1950.
- [Ros97]
-
L. Rosenberg.
Feelit mouse: Adding a realistic sense of feel to the computing
experience, 1997.
- [SVG03]
-
SVG.
Scalable vector graphics (svg) 1.1 specification.
http://www.w3.org/TR/SVG/, 2003.
- [X3D02]
-
X3D.
X3d working group overview.
http://www.web3d.org/x3d.html, 2002.
- [YRB01]
-
Wai Yu, Ramesh Ramloll, and Stephen Brewster.
Haptic graphs for blind computer users.
Lecture Notes in Computer Science, 2058:41-??, 2001.