Chapitre 6 Conclusion et perspectives
6.1 Des dispositifs, des interactions, de l’accessibilité
Du travail réalisé pour cette thèse, nous pouvons tirer plusieurs enseignements quant à nos questions initiales :
- L’utilisation de la modalité haptique détient un réel potentiel en matière d’interaction, en général, et en matière d’accessibilité, en particulier ;
- concernant le potentiel d’interaction, l’abus de retour de force réduit les performances; pour autant, une modélisation dynamique de la force, permet de corriger en partie ce problème.
- les dispositifs de pointage à retour de force permettent d’améliorer l’accessibilité à l’information en l’absence du mode visuel, pour autant que l’on considère les limites de ces dispositifs (voir point suivant) ;
- la localisation relative, illustrée par la métaphore du levier de vitesse, restreint l’utilisation des dispositifs de pointage à retour de force à la prise de connaissance des positions, en évitant les informations de formes et de textures. Pourtant, sa mise en œuvre s’est avérée viable dans des domaines aussi varié que la géographie et la musique.
De plus, nous avons produit et utilisé un schéma de conception enseignant-élève basée sur MVC, dans un contexte Web. Les communications client-serveurs de ce schéma étant asynchrones (AJAX), il autorise une interaction continue sans re-chargement des pages.
6.2 Pour aller plus loin…
6.2.1 D’autres applications de la localisation relative
Nous pouvons imaginer d’autres utilisations à la localisation relative, en passant en revu quelques utilisations du formalisme XML.
Chimie haptic : Le format de fichier CML (Chemical Markup Language) est l’implémentation XML de descriptions de molécules chimiques. Nous présentons en annexe une feuille de style XSLT (le langage de transformation d’un formalisme XML en un autre) qui transforme un fichier CML décrivant une molécule en deux dimension, en un fichier SVG exploitable avec notre approche.
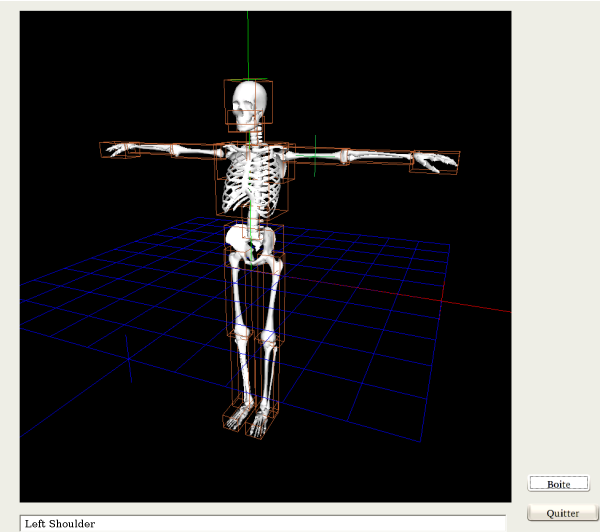
Body’Haptic (figure 6.1): L’approche est ici plus indirecte. Nous avons cherché à appliquer à la 3D, la localisation relative. Le SVG ne serait ici d’aucun secours, et nous nous sommes tourné vers son équivalent en 3D : le X3D. Du côté périphérique, c’est toujours un dispositif de pointage qui a été utilisé, mais tridimensionnel : le PHANTOM de Sensable.
Nous avons choisi comme champ d’application, l’exploration du corps humain. L’approche s’est encore avérée viable, mais ce sont les données qui sont plus difficile à obtenir. Le format X3D n’est de plus pas encore normalisé par le W3C, et son affichage dans un navigateur internet n’est possible que par l’utilisation de plugins dont le développement est plus ou moins avancé. Nous avons donc développé une application qui n’est pas en ligne pour tester, et en sommes resté à une exploration des os du corps humain.
- à plus long terme, les interfaces graphiques : le XUL de Mozilla et le XAML de Microsoft sont des applications du XML visant à décrire des interfaces graphiques. Nous n’avons pas plus développé dans ce sens; cependant, l’approche semble possible.
6.2.2 D’autres dispositifs : les écrans tactiles à retour haptique
6.2.2.1 Motivations, justifications
Comme nous l’avons plusieurs fois noté, tout au long de ce document, nous avons souffert de la nature même des dispositifs que nous avons étudiés : les périphériques de pointage telles que la souris ou le PHANTOM.
L’idée est alors venue qu’une approche quasi magique viendrait d’un écran tactile disposant d’un retour de force. Écran tactile pour permettre l’interaction directe, avec pourquoi pas plus d’un doigt à la fois. Et la boucle kinesthésique serait réalisée directement sur le dispositif, et non pas au travers de celui-ci.
6.2.2.2 Réalisations industrielles récentes
La firme Alpine16 a proposé un écran tactile disposant d’un retour tactile (figure 6.2). Le rôle de ce dispositif est la manipulation de l’autoradio, sans avoir nécessairement besoin de regarder l’écran. Cette approche reprend exactement notre positionnement dans le domaine de l’accessibilité. Néanmoins, le dispositif n’est à priori pas programmable.


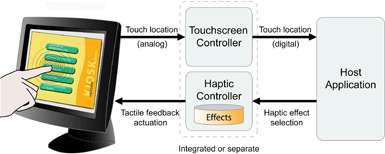
La société Immersion17, conceptrice de la souris que nous avons utilisée a également proposé récemment un écran tactile à retour tactile, le TouchScreen (figure 6.3)). La société immersion est déjà spécialisée dans les périphériques à retour de force (manettes de jeu, souris, outils chirurgicaux), et le touchscreen semble particulièrement adapté aux domaines de la recherche dans l’interaction haptique. C’est le dispositif, qui selon nous, permettrait d’exploiter au mieux la localisation relative, avec d’autres possibilités, en matière de bi-manualité notamment.
Enfin, Tactiva18, une start-up californienne a proposé le tactapad (figure 6.4). Ce dispositif propose la bi-manualité et le retour tactile. Néanmoins, il ne s’agit pour le moment que d’un prototype, non encore disponible sur le marché, et encore moins accessible dans un but de recherche. Il s’agit pourtant de la tentative la plus avancée, et la plus prometteuse en la matière.

6.2.2.3 Problèmes subsistants
Toutes ces tentatives n’ont pas encore montré leur potentiel. D’après les caractéristiques techniques, il semblerait de plus que tous ces écrans manquent de précision, et ceci pourrait être préjudiciable : il faudrait par exemple qu’ils soient capables de rendre des caractères brailles, dans un but d’accessibilité.
6.2.3 Le mot de la fin
Au final, cette thèse illustre bien le domaine de l’interaction homme-machine, du fait de sa pluri-disciplinarité. Notre étude nous aura en effet amené à traiter des neurosciences, de génie logiciel, d’interaction haptique, de la problématique de l’accessibilité, des architectures logiciels en contexte Web avec la problématique de la communication client-serveur asynchrone, et enfin de la représentation des données (en passant d’une partition musicale à un plan d’hexagones).
Les multiples aspects de l’Interaction Homme-Machine auront été à la base du plaisir que j’ai eu à travailler sur cette thèse.